Prior to UofT, I have worked at NVIDIA as a Software Engineer in their autonomous driving team at New Jersey reporting to Urs Muller and Beat Flepp. I am interested in general in autonomous robotics and specifically in perception for autonomous robots. During my time at Waterloo, I have worked at numerous different companies such as NVIDIA, Capital One, Diebold Nixdorf in capacity of Software Engineer, Data Scientist, Deep Learning Intern, etc.

|
I'm a computer vision engineer at Convolve AI building Vision AI solutions. I was previously at Huawei's Noah's Ark Research lab working with Bingbing Liu and Yuan Ren. My research revolves around perception for autonomous driving: 3D Reconstruction, Neural Radiance, Simulation, etc. Specifically I have worked on application of Neural Radiance methods to driving settings to enhance simulation capabilities. I obtained my MSc degree from the Department of Computer Science at the University of Toronto where I was a part of Robot Vision and Learning Laboratory. I was advised by Florian Shkurti at RVL. |
|
|
|
|

|
Mustafa Khan*, Hamidreza Fazlali, Dhruv Sharma, Tongtong Cao, Dongfeng Bai, Yuan Ren, Bingbing Liu International Conference on Robotics and Automation (ICRA), 2025 | London, UK PDF / Poster / Project Site AutoSplat extends 3D Gaussian Splatting for realistic reconstruction of dynamic autonomous driving scenes. It applies geometric and reflection-based constraints to ensure multi-view consistency of roads, skies, and moving objects. Experiments on Pandaset and KITTI show superior performance in scene reconstruction and novel view synthesis compared to existing methods. |
|
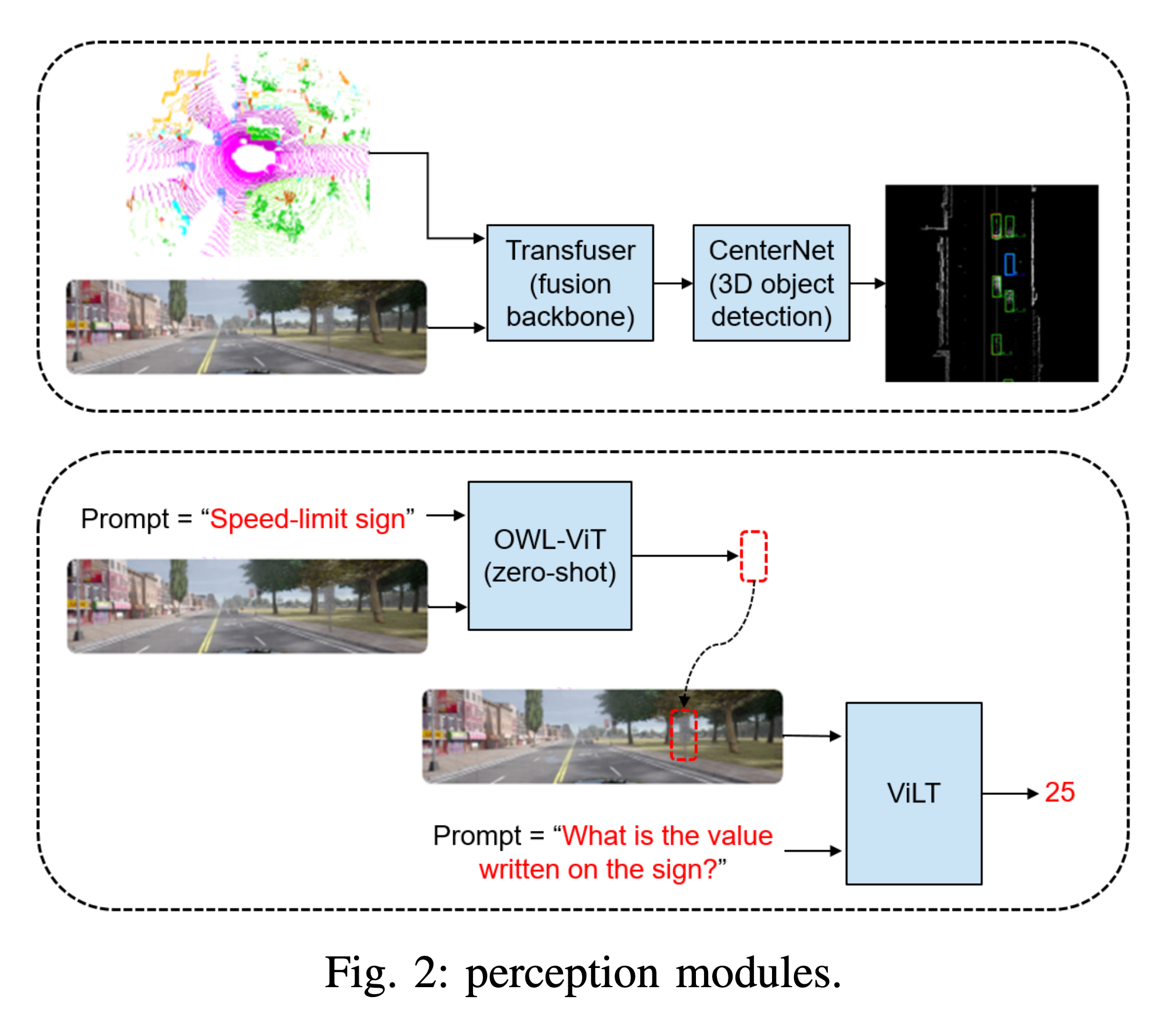
W Zhang, M Elmahgiubi, K Rezaee, B Khamidehi, H Mirkhani, F Arasteh, C Li, M A Kaleem, E R. Corral-Soto, Dhruv Sharma, T Cao PDF / Poster / Project Site The Kyber-E2E system, winner of the CARLA Leaderboard 2.0 AD Challenge 2023, features a modular architecture spanning sensing, localization, perception, prediction, and planning/control. Contributed to the perception module, which integrates language-assisted vision models to enhance scene understanding and planner reliability in complex traffic scenarios. |

|
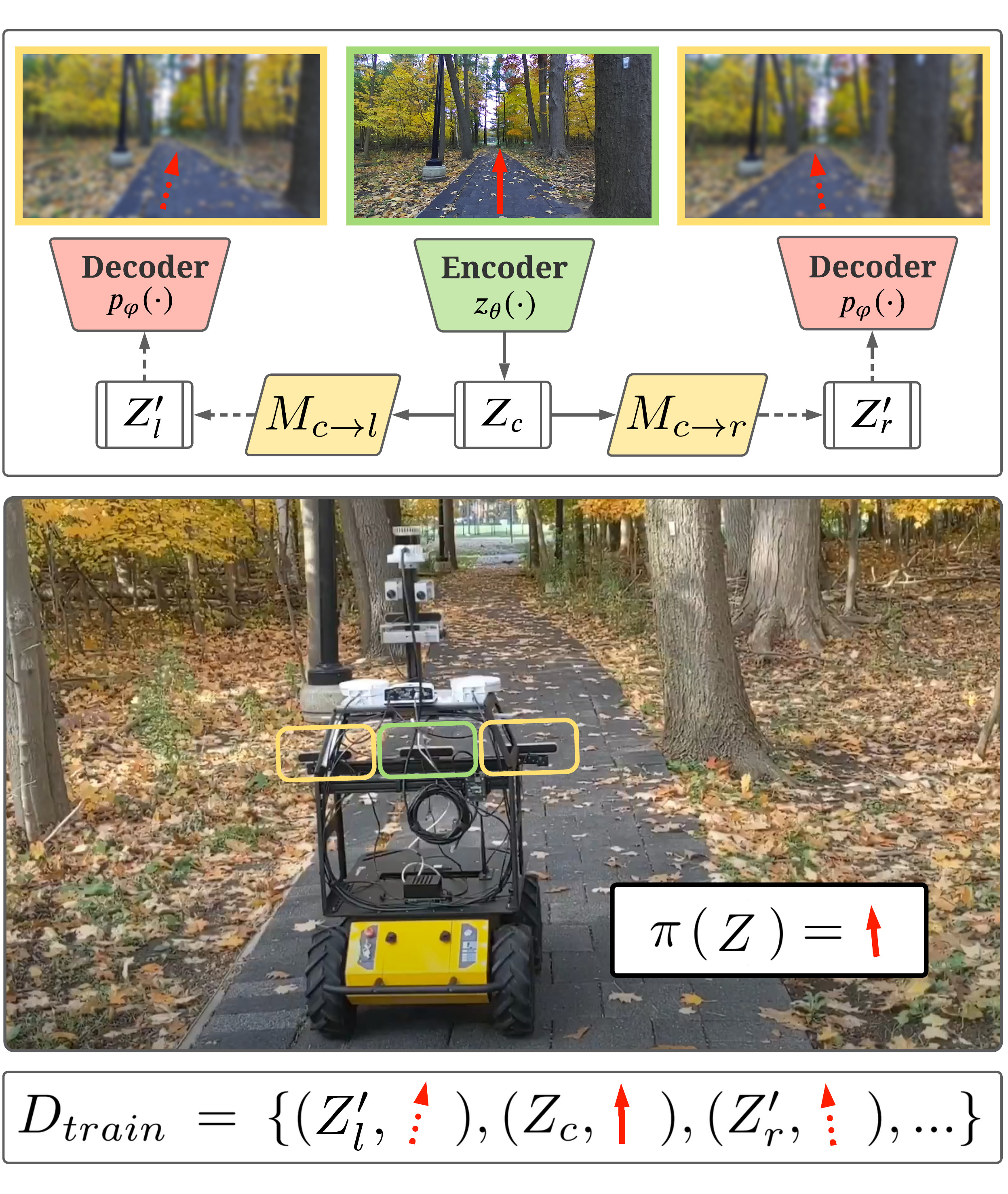
Dhruv Sharma*, Alihusein Kuwajerwala*, Florian Shkurti International Conference on Robotics and Automation (ICRA), 2022 | Philadelphia, USA PDF / Poster / Project Site Behavriour cloning comes with the covariate shift problem, i.e. an autonomous agent fails if the data seen at the test time is different from that seen at training time. This is usually addressed using additional sensors to collect data to train the agents. This work proposes a method to train robust behaviour cloning policies using the concept of image equivariance. |
|
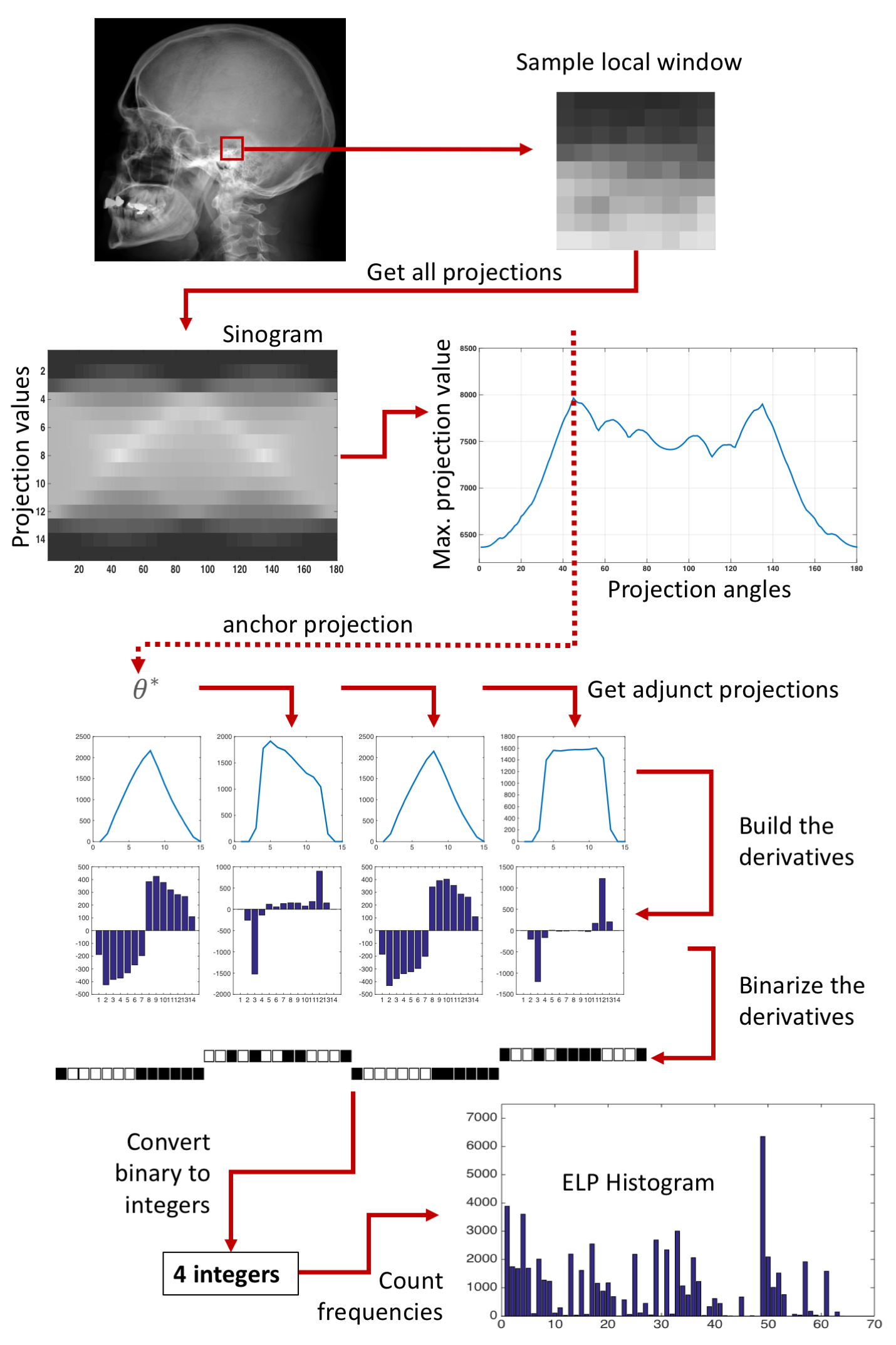
Dhruv Sharma, Sarim Zafar, Morteza Babaie, H.R. Tizhoosh IEEE-Symposium Series on Computational Intelligence, 2018 | Bengaluru, India This paper attempts for the first time to utilize ELP descriptor as primary features for facial recognition and compare the results with LBP histogram on the Labeled Faces in the Wild dataset. We have evaluated descriptors by comparing the chi-squared distance of each image descriptor versus all others as well as training Support Vector Machines (SVM) with each feature vector. In both cases, the results of ELP were better than LBP in the same sub-image configuration |
|
|
|
Dhruv Sharma*, Florian Shkurti Department of Computer Science, University of Toronto, 2021 | Toronto, CA My MSc. graduate work examines the problem of covariate shift in behavriour cloning. Covariate Shift is when an autonomous agent fails if the data seen at the test time is different from that seen at training time. This is usually addressed using additional sensors to collect data to train the agents. This work proposes a method to train robust behaviour cloning policies using the concept of image equivariance. |
|
|
|
Convolve AI, Convolve AI June 2024 - Present | Toronto, Ontario Vision AI solutions for government and industrial setups. Implementing vision AI for traffic analytics, workplace safety, and public infrastructure |
|
|
Huawei Canada, Noah's Ark Research Lab June 2022 - June 2024 | Toronto, Ontario Research & development for camera and lidar based perception for autonomous driving. Research focus: 3D Reconstruction, Neural Radiance, Volume Rendering, Simulation |

|
Robot Vision and Learning Lab, University of Toronto Sept 2019 - March 2021 | Toronto, Ontario Research & development at the intersection of robotics, AI, and computer vision. Developed techniques to enhance visual navigation using imitation learning while using less data. Used concept of image equivariance to improve visual navigation policies. |
|
|
NVIDIA | Advised by Dr. Urs Muller and Dr. Beat Flepp Oct 2018 - Oct 2019 | Holmdel, NJ Worked on the NVIDIAs research group developing end to end deep networks for NVIDIAs AI Car. Developed the self driving simulator as well as additional infrastructure to train and test networks. |
|
|
Waterloo Self Driving Car Project, University of Waterloo July 2018 - Sept 2018 | Waterloo, Ontario Performed simulation based research in autonomous driving using Copelia Robotics V-rep simulator and Unreal Engine based simulator. Integrated the dynamic vehicle model of the vehicle in the simulation pipeline. |
|
|
NVIDIA | Multiple Internships Jan 2016 - Sep 2017 | Santa Clara & New Jersey Research Lab Worked on developing autonomous driving technology on NVIDIA Drive hardware. Contributed to deep learning and robotics pipelines. Trained and tested on road deep neural netwrks to run the car. Contributed to demo video shoots. |

|
Capital One, Capital One KW Lab May 2015 - Aug 2015 | Kitchener, ON Created an NLP pipeline to classify and analyze customer feedback. Helped improve company's net promoter score KPI. |
|
|
Diebold Nixdorf, Prev. Phoenix Interactive Inc. Sept 2014 - Dec 2014 | London, ON Software development for Phoenix's flagship VisaATM terminal software. Developed new functionalities and implemented testing using Google frameworks. |
|
|
Department of Computer Science, University of Toronto Sep 2019 - Jan 2021 | Toronto, ON Ontario Graduate Scholarship |
|
|
Faculty of Applied Science and Engineering, University of Waterloo Sep 2013 - May 2018 | Waterloo, ON President's Research Award NSERC Undergraduate Research Award Dean's Honour List - 2015-2018 |
|
Some relevant course projects and design projects that I have worked on in the past. |

|
University of Toronto, AER1513 - State Estimation for Robotics
An implementation of monocular visual odometry on kitty dataset.
|
|
University of Toronto, AER1517 - Control for Robotics
Solving the inverted pendulum problem using Deep Q Learning.
|
|
University of Waterloo, Capstone Design Project
An autonomous wall painting robot capable of mapping, navigating, and painting walls in a room. ROS based
autonomy stack running on NVIDIA Jetson TX1. Got featured on techcrunch.
|